
Publications
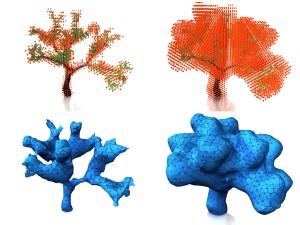
Robust eXtended Finite Elements for Complex Cutting of Deformables
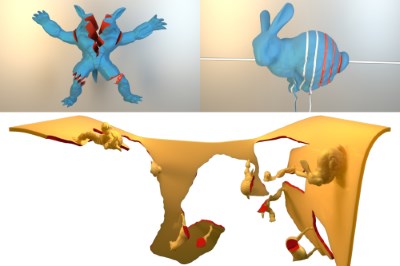
In this paper we present a robust remeshing-free cutting algorithm on the basis of the eXtended Finite Element Method (XFEM) and fully implicit time integration. One of the most crucial points of the XFEM is that integrals over discontinuous polynomials have to be computed on subdomains of the polyhedral elements. Most existing approaches construct a cut-aligned auxiliary mesh for integration. In contrast, we propose a cutting algorithm that includes the construction of specialized quadrature rules for each dissected element without the requirement to explicitly represent the arising subdomains. Moreover, we solve the problem of ill-conditioned or even numerically singular solver matrices during time integration using a novel algorithm that constrains non-contributing degrees of freedom (DOFs) and introduce a preconditioner that efficiently reuses the constructed quadrature weights. Our method is particularly suitable for fine structural cutting as it decouples the added number of DOFs from the cut's geometry and correctly preserves geometry and physical properties by accurate integration. Due to the implicit time integration these fine features can still be simulated robustly using large time steps. As opposed to this, the vast majority of existing approaches either use remeshing or element duplication. Remeshing based methods are able to correctly preserve physical quantities but strongly couple cut geometry and mesh resolution leading to an unnecessary large number of additional DOFs. Element duplication based approaches keep the number of additional DOFs small but fail at correct conservation of mass and stiffness properties. We verify consistency and robustness of our approach on simple and reproducible academic examples while stability and applicability are demonstrated in large scenarios with complex and fine structural cutting.
@ARTICLE{ Koschier2017,
author= {Dan Koschier and Jan Bender and Nils Thuerey},
title= {{Robust eXtended Finite Elements for Complex Cutting of Deformables}},
year= {2017},
journal= {ACM Transactions on Graphics (SIGGRAPH)},
publisher= {ACM},
volume = {36},
number = {4},
pages= {12}
}
A Survey on Position Based Dynamics, 2017

The physically-based simulation of mechanical effects has been an important research topic in computer graphics for more than two decades. Classical methods in this field discretize Newton's second law and determine different forces to simulate various effects like stretching, shearing, and bending of deformable bodies or pressure and viscosity of fluids, to mention just a few. Given these forces, velocities and finally positions are determined by a numerical integration of the resulting accelerations. In the last years position-based simulation methods have become popular in the graphics community. In contrast to classical simulation approaches these methods compute the position changes in each simulation step directly, based on the solution of a quasi-static problem. Therefore, position-based approaches are fast, stable and controllable which make them well-suited for use in interactive environments. However, these methods are generally not as accurate as force-based methods but provide visual plausibility. Hence, the main application areas of position-based simulation are virtual reality, computer games and special effects in movies and commercials. In this tutorial we first introduce the basic concept of position-based dynamics. Then we present different solvers and compare them with the variational formulation of the implicit Euler method in connection with compliant constraints. We discuss approaches to improve the convergence of these solvers. Moreover, we show how position-based methods are applied to simulate elastic rods, cloth, volumetric deformable bodies, rigid body systems and fluids. We also demonstrate how complex effects like anisotropy or plasticity can be simulated and introduce approaches to improve the performance. Finally, we give an outlook and discuss open problems.
@inproceedings {BMM2017,
title = "A Survey on Position Based Dynamics, 2017",
author = "Jan Bender and Matthias M{\"u}ller and Miles Macklin",
year = "2017",
booktitle = "EUROGRAPHICS 2017 Tutorials",
publisher = "Eurographics Association"
}
Position and Orientation Based Cosserat Rods
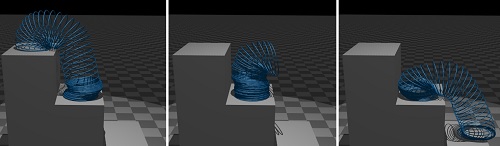
We present a novel method to simulate bending and torsion of elastic rods within the position-based dynamics (PBD) framework. The main challenge is that torsion effects of Cosserat rods are described in terms of material frames which are attached to the centerline of the rod. But frames or orientations do not fit into the classical position-based dynamics formulation. To solve this problem we introduce new types of constraints to couple orientations which are represented by unit quaternions. For constraint projection quaternions are treated in the exact same way as positions. Unit length is enforced with an additional constraint. This allows us to use the strain measures form Cosserat theory directly as constraints in PBD. It leads to very simple algebraic expressions for the correction displacements which only contain quaternion products and additions. Our results show that our method is very robust and accurately produces the complex bending and torsion effects of rods. Due to its simplicity our method is very efficient and more than one order of magnitude faster than existing position-based rod simulation methods. It even achieves the same performance as position-based simulations without torsion effects.
@INPROCEEDINGS{Kugelstadt2016,
author = {Tassilo Kugelstadt and Elmar Schoemer},
title = {Position and Orientation Based Cosserat Rods},
booktitle = {Proceedings of the 2016 ACM SIGGRAPH/Eurographics Symposium on Computer
Animation},
year = {2016},
publisher = {Eurographics Association},
location = {Zurich, Switzerland}
}
A Robust Method to Extract the Rotational Part of Deformations
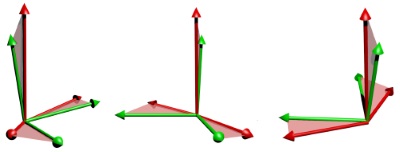
We present a novel algorithm to extract the rotational part of an arbitrary 3x3 matrix. This problem lies at the core of two popular simulation methods in computer graphics, the co-rotational Finite Element Method and Shape Matching techniques. In contrast to the traditional method based on polar decomposition, degenerate configurations and inversions are handled robustly and do not have to be treated in a special way. In addition, our method can be implemented with only a few lines of code without branches which makes it particularly well suited for GPU-based applications. We demonstrate the robustness, coherence and efficiency of our method by comparing it to stabilized polar decomposition in several simulation scenarios.
@inproceedings{Mueller2016,
author = {Matthias M\"{u}ller and Jan Bender and Nuttapong Chentanez and Miles Macklin},
title = {A Robust Method to Extract the Rotational Part of Deformations},
booktitle = {Proceedings of ACM SIGGRAPH Conference on Motion in Games},
series = {MIG '16},
year = {2016},
publisher = {ACM}
}
Position-Based Simulation Methods in Computer Graphics

The physically-based simulation of mechanical effects has been an important research topic in computer graphics for more than two decades. Classical methods in this field discretize Newton's second law and determine different forces to simulate various effects like stretching, shearing, and bending of deformable bodies or pressure and viscosity of fluids, to mention just a few. Given these forces, velocities and finally positions are determined by a numerical integration of the resulting accelerations.
In the last years position-based simulation methods have become popular in the graphics community. In contrast to classical simulation approaches these methods compute the position changes in each simulation step directly, based on the solution of a quasi-static problem. Therefore, position-based approaches are fast, stable and controllable which make them well-suited for use in interactive environments. However, these methods are generally not as accurate as force-based methods but still provide visual plausibility. Hence, the main application areas of position-based simulation are virtual reality, computer games and special effects in movies and commercials.
In this tutorial we first introduce the basic concept of position-based dynamics. Then we present different solvers and compare them with the classical implicit Euler method. We discuss approaches to improve the convergence of these solvers. Moreover, we show how position-based methods are applied to simulate hair, cloth, volumetric deformable bodies, rigid body systems and fluids. We also demonstrate how complex effects like anisotropy or plasticity can be simulated and introduce approaches to improve the performance. Finally, we give an outlook and discuss open problems.
@inproceedings{BMM2015,
title = "Position-Based Simulation Methods in Computer Graphics",
author = "Jan Bender and Matthias M{\"u}ller and Miles Macklin",
year = "2015",
booktitle = "EUROGRAPHICS 2015 Tutorials",
publisher = "Eurographics Association",
location = "Zurich, Switzerland"
}
A Survey on Position-Based Simulation Methods in Computer Graphics

The dynamic simulation of mechanical effects has a long history in computer graphics. The classical methods in this field discretize Newton's second law in a variety of Lagrangian or Eulerian ways, and formulate forces appropriate for each mechanical effect: joints for rigid bodies; stretching, shearing, or bending for deformable bodies; and pressure, or viscosity for fluids, to mention just a few. In the last years the class of position-based methods has become popular in the graphics community. These kinds of methods are fast, stable and controllable which make them well-suited for use in interactive environments. Position-based methods are not as accurate as force-based methods in general but they provide visual plausibility. Therefore, the main application areas of these approaches are virtual reality, computer games and special effects in movies.
This state-of-the-art report covers the large variety of position-based methods that were developed in the field of physically-based simulation. We will introduce the concept of position-based dynamics, present dynamic simulation based on shape matching and discuss data-driven upsampling approaches. Furthermore, we will present several applications for these methods.
@article{BMOTM2014,
title = "A Survey on Position-Based Simulation Methods in Computer Graphics",
author = "Jan Bender and Matthias M{\"{u}}ller and Miguel A. Otaduy and Matthias Teschner and Miles Macklin",
year = {2014},
volume = {33},
pages = {228--251},
number = {6},
journal = {Computer Graphics Forum},
doi = {10.1111/cgf.12346},
issn = {1467-8659},
url = {http://dx.doi.org/10.1111/cgf.12346}
}
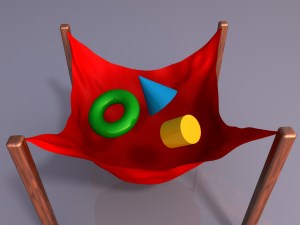
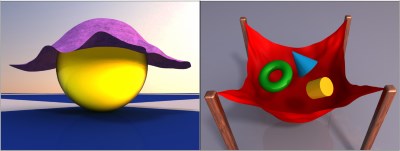
Position-Based Simulation of Continuous Materials

We introduce a novel fast and robust simulation method for deformable solids that supports complex physical effects like lateral contraction, anisotropy or elastoplasticity. Our method uses a continuum-based formulation to compute strain and bending energies for two- and three-dimensional bodies. In contrast to previous work, we do not determine forces to reduce these potential energies, instead we use a position-based approach. This combination of a continuum-based formulation with a position-based method enables us to keep the simulation algorithm stable, fast and controllable while providing the ability to simulate complex physical phenomena lacking in former position-based approaches. We demonstrate how to simulate cloth and volumetric bodies with lateral contraction, bending, plasticity as well as anisotropy and proof robustness even in case of degenerate or inverted elements. Due to the continuous material model of our method further physical phenomena like fracture or viscoelasticity can be easily implemented using already existing approaches. Furthermore, a combination with other geometrically motivated methods is possible.
@ARTICLE{Bender2014,
author = {Jan Bender and Dan Koschier and Patrick Charrier and Daniel Weber},
title = {Position-Based Simulation of Continuous Materials},
journal = {Computers \& Graphics },
year = {2014},
volume = {44},
pages = {1 - 10},
number = {0},
doi = {http://dx.doi.org/10.1016/j.cag.2014.07.004},
issn = {0097-8493}
}
Efficient GPU data structures and methods to solve sparse linear systems in dynamics applications

We present graphics processing unit (GPU) data structures and algorithms to efficiently solve sparse linear systems that are typically required in simulations of multi-body systems and deformable bodies. Thereby, we introduce an efficient sparse matrix data structure that can handle arbitrary sparsity patterns and outperforms current state-of-the-art implementations for sparse matrix vector multiplication. Moreover, an efficient method to construct global matrices on the GPU is presented where hundreds of thousands of individual element contributions are assembled in a few milliseconds. A finite-element-based method for the simulation of deformable solids as well as an impulse-based method for rigid bodies are introduced in order to demonstrate the advantages of the novel data structures and algorithms. These applications share the characteristic that a major computational effort consists of building and solving systems of linear equations in every time step. Our solving method results in a speed-up factor of up to 13 in comparison to other GPU methods.
@article{WebBenSchStoFel13,
author = {Weber, Daniel and Bender, Jan and Schnoes, Markus and Stork, Andr{\'e} and Fellner, Dieter},
title = {Efficient {GPU} Data Structures and Methods to Solve Sparse Linear Systems in Dynamics Applications},
year = {2013},
journal = {Computer Graphics Forum},
volume = {32},
number = {1},
publisher = {Blackwell Publishing Ltd},
issn = {1467-8659},
url = {http://dx.doi.org/10.1111/j.1467-8659.2012.03227.x},
doi = {10.1111/j.1467-8659.2012.03227.x},
pages = {16--26},
}
Position-based Methods for the Simulation of Solid Objects in Computer Graphics

The dynamic simulation of solids has a long history in computer graphics. The classical methods in this field are based on the use of forces or impulses to simulate joints between rigid bodies as well as the stretching, shearing and bending stiffness of deformable objects. In the last years the class of position-based methods has become popular in the graphics community. These kinds of methods are fast, unconditionally stable and controllable which make them well-suited for the use in interactive environments. Position-based methods are not as accurate as force based methods in general but they provide visual plausibility. Therefore, the main application areas of these approaches are virtual reality, computer games and special effects in movies.
This state of the art report covers the large variety of position-based methods that were developed in the field of deformable solids. We will introduce the concept of position-based dynamics, present dynamic simulation based on shape matching and discuss data-driven approaches. Furthermore, we will present several applications for these methods.
@inproceedings{BMOT2013,
title = "Position-based Methods for the Simulation of Solid Objects in Computer Graphics",
author = "Jan Bender and Matthias M{\"u}ller and Miguel A. Otaduy and Matthias Teschner",
year = "2013",
booktitle = "EUROGRAPHICS 2013 State of the Art Reports",
publisher = "Eurographics Association",
location = "Girona, Spain"
}
Fast and stable cloth simulation based on multi-resolution shape matching

We present an efficient and unconditionally stable method which allows the deformation of very complex stiff cloth models in real-time. This method is based on a shape matching approach which uses edges and triangles as 1D and 2D regions to simulate stretching and shearing resistance. Previous shape matching approaches require large overlapping regions to simulate stiff materials. This unfortunately also affects the bending behavior of the model. Instead of using large regions, we introduce a novel multi-resolution shape matching approach to increase only the stretching and shearing stiffness. Shape matching is performed for each level of the multi-resolution model and the results are propagated from one level to the next one. To preserve the fine wrinkles of the cloth on coarse levels of the hierarchy we present a modified version of the original shape matching method. The introduced method for cloth simulation can perform simulations in linear time and has no numerical damping. Furthermore, we show that multi-resolution shape matching can be performed efficiently on the GPU.
@ARTICLE{Bender2013_2,
author = {Jan Bender and Daniel Weber and Raphael Diziol},
title = {Fast and stable cloth simulation based on multi-resolution shape matching},
journal = {Computers \& Graphics },
year = {2013},
volume = {37},
pages = {945 - 954},
number = {8},
doi = {http://dx.doi.org/10.1016/j.cag.2013.08.003},
issn = {0097-8493},
url = {http://www.sciencedirect.com/science/article/pii/S0097849313001283}
}
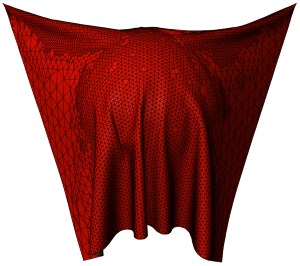
Adaptive cloth simulation using corotational finite elements

In this article we introduce an efficient adaptive cloth simulation method which is based on a reversible $\sqrt{3}$-refinement of corotational finite elements. Our novel approach can handle arbitrary triangle meshes and is not restricted to regular grid meshes which are required by other adaptive methods. Most previous works in the area of adaptive cloth simulation use discrete cloth models like mass-spring systems in combination with a specific subdivision scheme. However, if discrete models are used, the simulation does not converge to the correct solution as the mesh is refined. Therefore, we introduce a cloth model which is based on continuum mechanics since continuous models do not have this problem. We use a linear elasticity model in combination with a corotational formulation to achieve a high performance. Furthermore, we present an efficient method to update the sparse matrix structure after a refinement or coarsening step. The advantage of the $\sqrt{3}$-subdivision scheme is that it generates high quality meshes while the number of triangles increases only by a factor of 3 in each refinement step. However, the original scheme was not intended for the use in an interactive simulation and only defines a mesh refinement. In this article we introduce a combination of the original refinement scheme with a novel coarsening method to realize an adaptive cloth simulation with high quality meshes. The proposed approach allows an efficient mesh adaption and therefore does not cause much overhead. We demonstrate the significant performance gain which can be achieved with our adaptive simulation method in several experiments including a complex garment simulation.
@ARTICLE{Bender2013,
author = {Jan Bender and Crispin Deul},
title = {Adaptive cloth simulation using corotational finite elements },
journal = {Computers \& Graphics },
year = {2013},
volume = {37},
pages = {820 - 829},
number = {7},
doi = {http://dx.doi.org/10.1016/j.cag.2013.04.008},
url = {http://www.sciencedirect.com/science/article/pii/S0097849313000605},
issn = {0097-8493}
}
Physically-Based Character Skinning

In this paper we present a novel multi-layer model for physically-based character skinning. In contrast to geometric approaches which are commonly used in the field of character skinning, physically-based methods can simulate secondary motion effects. Furthermore, these methods can handle collisions and preserve the volume of the model without the need of an additional post-process. Physically-based approaches are computationally more expensive than geometric methods but they provide more realistic results. Recent works in this area use finite element simulations to model the elastic behavior of skin. These methods require the generation of a volumetric mesh for the skin shape in a pre-processing step. It is not easy for an artist to model the different elastic behaviors of muscles, fat and skin using a volumetric mesh since there is no clear assignment between volume elements and tissue types. For our novel multi-layer model the mesh generation is very simple and can be performed automatically. Furthermore, the model contains a layer for each kind of tissue. Therefore, the artist can easily control the elastic behavior by adjusting the stiffness parameters for muscles, fat and skin. We use shape matching with oriented particles and a fast summation technique to simulate the elastic behavior of our skin model and a position-based constraint enforcement to handle collisions, volume conservation and the coupling of the skeleton with the deformable model. Position-based methods have the advantage that they are fast, unconditionally stable, controllable and provide visually plausible results.
@inproceedings{Deul2013,
author = {Crispin Deul and Jan Bender},
title = {Physically-Based Character Skinning},
booktitle = {Virtual Reality Interactions and Physical Simulations (VRIPhys)},
year = {2013},
month = nov,
address = {Lille, France},
publisher = {Eurographics Association}
}
Multilevel Cloth Simulation using GPU Surface Sampling

Today most cloth simulation systems use triangular mesh models. However, regular grids allow many optimizations as connectivity is implicit, warp and weft directions of the cloth are aligned to grid edges and distances between particles are equal. In this paper we introduce a cloth simulation that combines both model types. All operations that are performed on the CPU use a low-resolution triangle mesh while GPU-based methods are performed efficiently on a high-resolution grid representation. Both models are coupled by a sampling operation which renders triangle vertex data into a texture and by a corresponding projection of texel data onto a mesh. The presented scheme is very flexible and allows individual components to be performed on different architectures, data representations and detail levels. The results are combined using shader programs which causes a negligible overhead. We have implemented CPU-based collision handling and a GPU-based hierarchical constraint solver to simulate systems with more than 230k particles in real-time.
@inproceedings{Schmitt2013,
author = {Nikolas Schmitt and Martin Knuth and Jan Bender and Arjan Kuijper},
title = {Multilevel Cloth Simulation using GPU Surface Sampling},
booktitle = {Virtual Reality Interactions and Physical Simulations (VRIPhys)},
year = {2013},
month = nov,
address = {Lille, France},
publisher = {Eurographics Association}
}
Efficient cloth simulation using an adaptive finite element method
In this paper we present an efficient adaptive cloth simulation based on the sqrt(3)-refinement scheme. Our adaptive cloth model can handle arbitrary triangle meshes and is not restricted to regular grid meshes which are required by other methods. Previous works on adaptive cloth simulation often use discrete cloth models like mass-spring systems in combination with a specific subdivision scheme. The problem of such models is that the simulation does not converge to the correct solution as the mesh is refined. We propose to use a cloth model which is based on continuum mechanics since continuous models do not have this problem. In order to perform an efficient simulation we use a linear elasticity model in combination with a corotational formulation.
The sqrt(3)-subdivision scheme has the advantage that it generates high quality meshes while the number of triangles increases only by a factor of 3 in each refinement step. However, the original scheme only defines a mesh refinement. Therefore, we introduce an extension to support the coarsening of our simulation model as well. Our proposed mesh adaption can be performed efficiently and therefore does not cause much overhead. In this paper we will show that a significant performance gain can be achieved by our adaptive method.
@inproceedings{Bender12,
author = {Jan Bender and Crispin Deul},
title = {Efficient Cloth Simulation Using an Adaptive Finite Element Method},
booktitle = {Virtual Reality Interactions and Physical Simulations (VRIPhys)},
isbn = {978-3-905673-96-8},
year = {2012},
month = dec,
address = {Darmstadt, Germany},
publisher = {Eurographics Association},
DOI = {10.2312/PE/vriphys/vriphys12/021-030},
pages = {21-30}
}
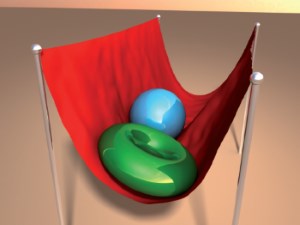
Robust Real-Time Deformation of Incompressible Surface Meshes

We introduce an efficient technique for robustly simulating incompressible objects with thousands of elements in real-time. Instead of considering a tetrahedral model, commonly used to simulate volumetric bodies, we simply use their surfaces. Not requiring hundreds or even thousands of elements in the interior of the object enables us to simulate more elements on the surface, resulting in high quality deformations at low computation costs. The elasticity of the objects is robustly simulated with a geometrically motivated shape matching approach which is extended by a fast summation technique for arbitrary triangle meshes suitable for an efficient parallel computation on the GPU. Moreover, we present an oscillation-free and collision-aware volume constraint, purely based on the surface of the incompressible body. The novel heuristic we propose in our approach enables us to conserve the volume, both globally and locally. Our volume constraint is not limited to the shape matching method and can be used with any method simulating the elasticity of an object. We present several examples which demonstrate high quality volume conserving deformations and compare the run-times of our CPU implementation, as well as our GPU implementation with similar methods.
SCA 2011 Honorable Mention
@INPROCEEDINGS{Diziol2011,
author = {Raphael Diziol and Jan Bender and Daniel Bayer},
title = {Robust Real-Time Deformation of Incompressible Surface Meshes},
booktitle = {Proceedings of the 2011 ACM SIGGRAPH/Eurographics Symposium on Computer
Animation},
year = {2011},
publisher = {Eurographics Association},
location = {Vancouver, Canada}
}
Simulating inextensible cloth using locking-free triangle meshes

This paper presents an efficient method for the dynamic simulation of inextensible cloth. The triangle mesh for our cloth model is simulated using an impulse-based approach which is able to solve hard constraints. Using hard distance constraints on the edges of the triangle mesh removes too many degrees of freedom, resulting in a rigid motion. This is known as the locking problem which is typically solved by using rectangular meshes in existing impulse-based simulations. We solve this problem by using a nonconforming representation for the simulation model which unfortunately results in a discontinuous mesh. Therefore, we couple the original conforming mesh with the nonconforming elements and use it for collision handling and visualization.
@inproceedings{Bender11,
author = {Jan Bender and Raphael Diziol and Daniel Bayer},
title = {Simulating inextensible cloth using locking-free triangle meshes},
booktitle = {Virtual Reality Interactions and Physical Simulations (VRIPhys)},
year = {2011},
month = dec,
address = {Lyon (France)},
pages = {11-17}
}
Volume Conserving Simulation of Deformable Bodies
We present a new method for simulating volume conserving deformable bodies using an impulse-based approach. In order to simulate a deformable body a tetrahedral model is generated from an arbitrary triangle mesh. All resulting tetrahedrons are assigned to volume constraints which ensure the conservation of the total volume. For the simulation of such a constraint impulses are computed and applied to the particles of the assigned tetrahedrons. The algorithm is easy to implement and ensures exact volume conservation in each simulation step.
@inproceedings{Diziol09,
author = {Raphael Diziol and Jan Bender and Daniel Bayer},
title = {Volume Conserving Simulation of Deformable Bodies},
booktitle = {Short Paper Proceedings of Eurographics},
year = {2009},
month = mar,
address = {Munich (Germany)}
}
Simulating Almost Incompressible Deformable Objects

We present a new method for simulating almost incompressible deformable objects. A tetrahedral model is used to represent and restore the volume during the simulation. The new constraint computes impulses in the onering of each vertex of the tetrahedral model, in order to conserve the initial volume. With different parameters, the presented method can handle a large variety of different deformation behaviors, ranging from stiff to large deformations and even plastic deformations. The algorithm is easy to implement and reduces the volume error to less than 1% in most situations, even when large deformations are applied.
@inproceedings{Diziol09,
author = {Raphael Diziol and Daniel Bayer and Jan Bender},
title = {Simulating Almost Incompressible Deformable Objects},
booktitle = {Virtual Reality Interactions and Physical Simulations (VRIPhys)},
year = {2009},
month = nov,
address = {Karlsruhe (Germany)},
pages = {31-37}
}
Optimized impulse-based dynamic simulation

The impulse-based dynamic simulation is a recent method to compute physically based simulations. It supports the simulation of rigid-bodies and particles connected by all kinds of implicit constraints. In recent years the impulse-based dynamic simulation has been more and more used to simulate deformable bodies as well. These simulations create new requirements for the runtime of the method because very large systems of connected particles have to be simulated to get results of high quality. In this paper several runtime optimizations for the impulse-based dynamic simulation are presented. They allow to compute the same simulations at a fraction of time needed for the original method. Therefore, larger systems or simulations with increased accuracy can be simulated in realtime.
@inproceedings{Bayer09,
author = {Daniel Bayer and Raphael Diziol and Jan Bender},
title = {Optimized Impulse-Based Dynamic Simulation},
booktitle = {Virtual Reality Interactions and Physical Simulations (VRIPhys)},
year = {2009},
month = nov,
address = {Karlsruhe (Germany)},
pages = {125-133}
}
Dynamic simulation of inextensible cloth
In this paper an impulse-based method for cloth simulation is presented. The simulation of cloth is required in different application areas like computer animation, virtual reality or computer games. Simulation methods often assume that cloth is an elastic material. With this assumption the simulation can be performed very efficiently using spring forces. The problem is that many textiles cannot be stretched significantly. A realistic simulation of these textiles with spring forces leads to stiff differential equations which cause a deterioration of performance. The impulse-based method described in this paper solves this problem and allows the realistic simulation of inelastic textiles.
@article{Bender2009,
author = {Jan Bender and Daniel Bayer and Raphael Diziol},
title = {Dynamic simulation of inextensible cloth},
journal = {IADIS International Journal on Computer Science and Information Systems},
volume = {4},
number = {2},
year = {2009},
pages = {86--102}
}
Impulse-based dynamic simulation on the GPU

In this paper a new, efficient method for dynamic simulation on the GPU is presented. The method is based on an impulse-based approach which is an ideal candidate to simulate on limited hardware due to its simplicity. The proposed method shows how the impulse-based dynamic simulation can benefit from the highly parallel structure of the GPU without suffering too much losses by its limitations. This is achieved by the use of a new way to solve constraints. Most parts of the actual computation can be done in parallel, using only a few number of operations. This allows the implementation to run on a wide range of graphics boards.
@inproceedings{Bayer09,
author = {Daniel Bayer and Jan Bender and Raphael Diziol},
title = {Impulse-based dynamic simulation on the GPU},
booktitle = {Computer Graphics and Visualization (CGV 2009) - IADIS Multi Conference on Computer Science and Information Systems},
year = {2009},
month = jun,
address = {Algarve (Portugal)}
}
Parallel simulation of inextensible cloth
This paper presents an efficient simulation method for parallel cloth simulation. The presented method uses an impulse-based approach for the simulation. Cloth simulation has many application areas like computer animation, computer games or virtual reality. Simulation methods often make the assumption that cloth is an elastic material. In this way the simulation can be performed very efficiently by using spring forces. These methods disregard the fact that many textiles cannot be stretched significantly. The simulation of inextensible textiles with methods based on spring forces leads to stiff differential equations which cause a loss of performance. In contrast to that, in this paper a method is presented that simulates cloth by using impulses. The mesh of a cloth model is subdivided into strips of constraints. The impulses for each strip can be computed in linear time. The strips that have no common particle are independent from each other and can be solved in parallel. The impulse-based method allows the realistic simulation of inextensible textiles in real-time.
@inproceedings{Bender08,
author = {Jan Bender and Daniel Bayer},
title = {Parallel simulation of inextensible cloth},
booktitle = {Virtual Reality Interactions and Physical Simulations (VRIPhys)},
year = {2008},
month = nov,
address = {Grenoble (France)},
pages = {47-56}
}
Impulse-based simulation of inextensible cloth
In this paper an impulse-based method for cloth simulation is presented. The simulation of cloth is required in different application areas like computer animation, virtual reality or computer games. Simulation methods often assume that cloth is an elastic material. With this assumption the simulation can be performed very efficiently using spring forces. The problem is that many textiles cannot be stretched significantly. A realistic simulation of these textiles with spring forces leads to stiff differential equations which cause a deterioration of performance. The impulse-based method described in this paper solves this problem and allows the realistic simulation of inelastic textiles.
@inproceedings{Bender08,
author = {Jan Bender and Daniel Bayer},
title = {Impulse-based simulation of inextensible cloth},
booktitle = {Computer Graphics and Visualization (CGV 2008) - IADIS Multi Conference on Computer Science and Information Systems},
year = {2008},
month = jul,
address = {Amsterdam (Netherlands)}
}
