
Profile

|
José Antonio Fernández-Fernández, M.Sc. |
Publications
Simulation Methods for Multiphysics Phenomena in Visual Computing

Physics simulation is a cornerstone of many computer graphics applications, ranging from video games and virtual reality to visual effects and computational design. The number of techniques for physically-based modeling and animation has thus skyrocketed over the past few decades, facilitating the simulation of a wide variety of materials and physical phenomena. These course notes provide an in-depth introduction to multiphysics simulation methods for computer graphics, covering the mathematical foundations, key algorithms, and practical considerations behind the most widely used approaches. We focus on methods developed by the computer graphics community for simulating various physical phenomena and materials -- including rigid and deformable bodies, fluids, and granular materials -- as well as the interactions between them. For each method, we present the underlying mathematical framework with detailed derivations and discuss how different materials and coupling strategies fit into the formulation. A selection of software frameworks that offer out-of-the-box multiphysics modeling capabilities is also presented. Finally, we touch on emerging trends in physics-based animation, including machine learning-based methods which have become increasingly popular in recent years.
@inproceedings{LJFB2026,
booktitle = {Eurographics 2026 - Tutorials},
title = {{Simulation Methods for Multiphysics Phenomena in Visual Computing}},
author = {Löschner, Fabian and Jeske, Stefan Rhys and Fernández-Fernández, José Antonio and Bender, Jan},
year = {2026},
publisher = {The Eurographics Association},
ISSN = {1017-4656},
ISBN = {978-3-03868-267-7},
DOI = {10.2312/egt.20261002}
}
Progressively Projected Newton’s Method

Newton's Method is widely used to find the solution of complex non-linear simulation problems. To guarantee a descent direction, it is common practice to clamp the negative eigenvalues of each element Hessian prior to assembly — a strategy known as Projected Newton (PN) — but this perturbation often hinders convergence. In this work, we observe that projecting only a small subset of element Hessians is sufficient to secure a descent direction. Building on this insight, we introduce Progressively Projected Newton (PPN), a novel variant of Newton's Method that uses the current iterate's residual to cheaply determine the subset of element Hessians to project. The benefit is twofold: most eigendecompositions are avoided and the global Hessian remains closer to its original form, reducing the number of Newton iterations. We compare PPN with PN and Project-on-Demand Newton (PDN) in a comprehensive set of experiments covering contact-free and contact-rich deformables, co-dimensional and rigid-body simulations, and a range of time step sizes, tolerances and resolutions. PPN reduces the amount of element projections in dynamic simulations by one order of magnitude while simultaneously improving convergence, consistently being the fastest solver in our benchmark.
» Show BibTeX
@article{FLB2026,
title={Progressively Projected Newton's Method},
author={José Antonio Fernández-Fernández and Fabian Löschner and Jan Bender},
year = {2026},
journal = {Computer Graphics Forum (Eurographics)},
volume = {45},
number = {2}
}
SymX: Energy-based Simulation from Symbolic Expressions

Optimization time integrators are effective at solving complex multi-physics problems including deformable solids with non-linear material models, contact with friction, strain limiting, etc. For challenging problems, Newton-type optimizers are often used, which necessitates first- and second-order derivatives of the global non-linear objective function. Manually differentiating, implementing, testing, optimizing, and maintaining the resulting code is extremely time-consuming, error-prone, and precludes quick changes to the model, even when using tools that assist with parts of such pipeline.
We present SymX, an open source framework that computes the required derivatives of the different energy contributions by symbolic differentiation, generates optimized code, compiles it on-the-fly, and performs the global assembly. The user only has to provide the symbolic expression of each energy for a single representative element in its corresponding discretization and our system will determine the assembled derivatives for the whole simulation. We demonstrate the versatility of SymX in complex simulations featuring different non-linear materials, high-order finite elements, rigid body systems, adaptive discretizations, frictional contact, and coupling of multiple interacting physical systems.
SymX’s derivatives offer performance on par with SymPy, an established off-the-shelf symbolic engine, and produces simulations at least one order of magnitude faster than TinyAD, an alternative state-of-the-art integral solution.
» Show BibTeX
@Article{FLW25,
author = {Fern\'{a}ndez-Fern\'{a}ndez, Jos\'{e} Antonio and L\"{o}schner, Fabian and Westhofen, Lukas and Longva, Andreas and Bender, Jan},
title = {SymX: Energy-based Simulation from Symbolic Expressions},
year = {2025},
issue_date = {February 2026},
publisher = {Association for Computing Machinery},
address = {New York, NY, USA},
volume = {45},
number = {1},
issn = {0730-0301},
url = {https://doi.org/10.1145/3764928},
doi = {10.1145/3764928},
journal = {ACM Trans. Graph.},
month = oct,
articleno = {5},
numpages = {19},
keywords = {Physically-based simulation, symbolic differentiation, optimization time integration}
}
Interactive Facial Animation: Enhancing Facial Rigs With Real-Time Shell And Contact Simulation

Demand for high-quality virtual 3D characters continues to grow in both entertainment and communication, and with it, the desire for interactive avatars. This presents unique challenges for high-fidelity interactive solutions that must be quick to set up, efficient to run in real-time on consumer hardware, and work well, not only on human characters, but also on fantastical and heavily stylized ones. We present Interactive Facial Animation (IFA), a novel approach to augment facial animation rigs with shell simulation and contact without requiring anatomical priors or artist intervention. Our method uses an efficient shell model that tracks the output of a face rig in real-time and incorporates realistic contact. By designing our shell model to be differentiable, we can use inverse simulation to reconstruct realistic non-uniform stiffness that captures both stiff (ears, nose) and soft (cheeks, lips) areas, based on the rig’s deformation space. The reconstruction process imposes hard limits on acceptable errors, which ensures that IFA preserves the resolution and expressiveness of the source material, a common shortcoming in many face simulation pipelines. With performance in mind, we demonstrate IFA using a variant of the Fast Mass-Springs method. However, the presented concept can be realized with any differentiable physics solver that provides reliable convergence. We showcase our method in four different character rigs, achieving simulation update runtimes between 0.39 and 1.27 milliseconds (787-2564 FPS) on a single CPU thread. Unlike existing methods that require lengthy preparation times, our pipeline can be ready to use within minutes, also on the CPU.
» Show BibTeX
@article{fernandez-fernandezInteractiveFacialAnimation2025,
title = {Interactive {{Facial Animation}}: {{Enhancing Facial Rigs With Real-Time Shell And Contact Simulation}}},
author = {{Fern{\'a}ndez-Fern{\'a}ndez}, Jos{\'e} Antonio and Goldade, Ryan and Kavan, Ladislav and Bender, Jan and Herholz, Philipp},
year = {2025},
journal = {Proceedings of the ACM on Computer Graphics and Interactive Techniques},
}
STARK: A Unified Framework for Strongly Coupled Simulation of Rigid and Deformable Bodies with Frictional Contact

The use of simulation in robotics is increasingly widespread for the purpose of testing, synthetic data generation and skill learning. A relevant aspect of simulation for a variety of robot applications is physics-based simulation of robot-object interactions. This involves the challenge of accurately modeling and implementing different mechanical systems such as rigid and deformable bodies as well as their interactions via constraints, contact or friction. Most state-of-the-art physics engines commonly used in robotics either cannot couple deformable and rigid bodies in the same framework, lack important systems such as cloth or shells, have stability issues in complex friction-dominated setups or cannot robustly prevent penetrations. In this paper, we propose a framework for strongly coupled simulation of rigid and deformable bodies with focus on usability, stability, robustness and easy access to state-of-the-art deformation and frictional contact models. Our system uses the Finite Element Method (FEM) to model deformable solids, the Incremental Potential Contact (IPC) approach for frictional contact and a robust second order optimizer to ensure stable and penetration-free solutions to tight tolerances. It is a general purpose framework, not tied to a particular use case such as grasping or learning, it is written in C++ and comes with a Python interface. We demonstrate our system’s ability to reproduce complex real-world experiments where a mobile vacuum robot interacts with a towel on different floor types and towel geometries. Our system is able to reproduce 100% of the qualitative outcomes observed in the laboratory environment. The simulation pipeline, named Stark (the German word for strong, as in strong coupling) is made open-source.
» Show BibTeX
@INPROCEEDINGS{FLL+24,
author={Fernández-Fernández, José Antonio and Lange, Ralph and Laible, Stefan and Arras, Kai O. and Bender, Jan},
booktitle={2024 IEEE International Conference on Robotics and Automation (ICRA)},
title={STARK: A Unified Framework for Strongly Coupled Simulation of Rigid and Deformable Bodies with Frictional Contact},
year={2024}
}
Strongly Coupled Simulation of Magnetic Rigid Bodies

We present a strongly coupled method for the robust simulation of linear magnetic rigid bodies. Our approach describes the magnetic effects as part of an incremental potential function. This potential is inserted into the reformulation of the equations of motion for rigid bodies as an optimization problem. For handling collision and friction, we lean on the Incremental Potential Contact (IPC) method. Furthermore, we provide a novel, hybrid explicit / implicit time integration scheme for the magnetic potential based on a distance criterion. This reduces the fill-in of the energy Hessian in cases where the change in magnetic potential energy is small, leading to a simulation speedup without compromising the stability of the system. The resulting system yields a strongly coupled method for the robust simulation of magnetic effects. We showcase the robustness in theory by analyzing the behavior of the magnetic attraction against the contact resolution. Furthermore, we display stability in practice by simulating exceedingly strong and arbitrarily shaped magnets. The results are free of artifacts like bouncing for time step sizes larger than with the equivalent weakly coupled approach. Finally, we showcase the utility of our method in different scenarios with complex joints and numerous magnets.
» Show BibTeX
@article{WFJB24,
author = {Westhofen, Lukas and Fernández-Fernández, José Antonio and Jeske, Stefan Rhys and Bender, Jan},
title = {Strongly Coupled Simulation of Magnetic Rigid Bodies},
journal = {Computer Graphics Forum},
volume = {43},
number = {8},
doi = {https://doi.org/10.1111/cgf.15185},
url = {https://onlinelibrary.wiley.com/doi/abs/10.1111/cgf.15185},
year = {2024}
}
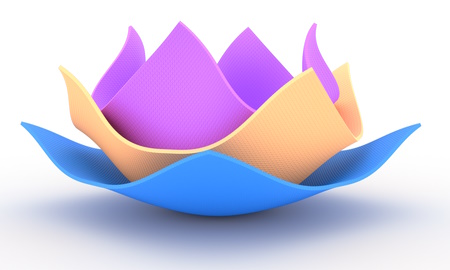
Curved Three-Director Cosserat Shells with Strong Coupling
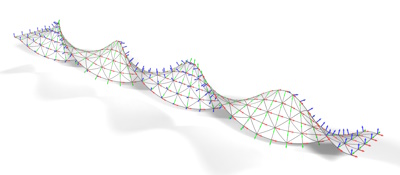
Continuum-based shell models are an established approach for the simulation of thin deformables in computer graphics. However, existing research in physically-based animation is mostly focused on shear-rigid Kirchhoff-Love shells. In this work we explore three-director Cosserat (micropolar) shells which introduce additional rotational degrees of freedom. This microrotation field models transverse shearing and in-plane drilling rotations. We propose an incremental potential formulation of the Cosserat shell dynamics which allows for strong coupling with frictional contact and other physical systems. We evaluate a corresponding finite element discretization for non-planar shells using second-order elements which alleviates shear-locking and permits simulation of curved geometries. Our formulation and the discretization, in particular of the rotational degrees of freedom, is designed to integrate well with typical simulation approaches in physically-based animation. While the discretization of the rotations requires some care, we demonstrate that they do not pose significant numerical challenges in Newton’s method. In our experiments we also show that the codimensional shell model is consistent with the respective three-dimensional model. We qualitatively compare our formulation with Kirchhoff-Love shells and demonstrate intriguing use cases for the additional modes of control over dynamic deformations offered by the Cosserat model such as directly prescribing rotations or angular velocities and influencing the shell’s curvature.
» Show BibTeX
@article{LFJB24,
author = {L\"oschner, Fabian and Fernández-Fernández, José Antonio and Jeske, Stefan Rhys and Bender, Jan},
title = {Curved Three-Director Cosserat Shells with Strong Coupling},
journal = {Computer Graphics Forum},
volume = {43},
number = {8},
doi = {https://doi.org/10.1111/cgf.15183},
url = {https://onlinelibrary.wiley.com/doi/abs/10.1111/cgf.15183},
year = {2024}
}
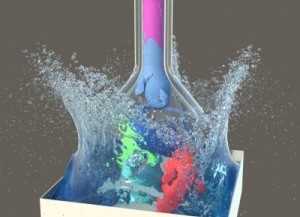
Implicit Surface Tension for SPH Fluid Simulation

The numerical simulation of surface tension is an active area of research in many different fields of application and has been attempted using a wide range of methods. Our contribution is the derivation and implementation of an implicit cohesion force based approach for the simulation of surface tension effects using the Smoothed Particle Hydrodynamics (SPH) method. We define a continuous formulation inspired by the properties of surface tension at the molecular scale which is spatially discretized using SPH. An adapted variant of the linearized backward Euler method is used for time discretization, which we also strongly couple with an implicit viscosity model. Finally, we extend our formulation with adhesion forces for interfaces with rigid objects.
Existing SPH approaches for surface tension in computer graphics are mostly based on explicit time integration, thereby lacking in stability for challenging settings. We compare our implicit surface tension method to these approaches and further evaluate our model on a wider variety of complex scenarios, showcasing its efficacy and versatility. Among others, these include but are not limited to simulations of a water crown, a dripping faucet and a droplet-toy.
» Show BibTeX
@article{Jeske2023,
title = {Implicit {{Surface Tension}} for {{SPH Fluid Simulation}}},
author = {Jeske, Stefan Rhys and Westhofen, Lukas and L{\"o}schner, Fabian and {Fern{\'a}ndez-Fern{\'a}ndez}, Jos{\'e} Antonio and Bender, Jan},
year = {2023},
month = nov,
journal = {ACM Transactions on Graphics},
volume = {43},
number = {1},
issn = {0730-0301},
doi = {10.1145/3631936},
urldate = {2023-11-07},
keywords = {adhesion,cohesion,fluid simulation,smoothed particle hydrodynamics,surface tension},
}
Micropolar Elasticity in Physically-Based Animation
We explore micropolar materials for the simulation of volumetric deformable solids. In graphics, micropolar models have only been used in the form of one-dimensional Cosserat rods, where a rotating frame is attached to each material point on the one-dimensional centerline. By carrying this idea over to volumetric solids, every material point is associated with a microrotation, an independent degree of freedom that can be coupled to the displacement through a material's strain energy density. The additional degrees of freedom give us more control over bending and torsion modes of a material. We propose a new orthotropic micropolar curvature energy that allows us to make materials stiff to bending in specific directions.
For the simulation of dynamic micropolar deformables we propose a novel incremental potential formulation with a consistent FEM discretization that is well suited for the use in physically-based animation. This allows us to easily couple micropolar deformables with dynamic collisions through a contact model inspired from the Incremental Potential Contact (IPC) approach. For the spatial discretization with FEM we discuss the challenges related to the rotational degrees of freedom and propose a scheme based on the interpolation of angular velocities followed by quaternion time integration at the quadrature points.
In our evaluation we validate the consistency and accuracy of our discretization approach and demonstrate several compelling use cases for micropolar materials. This includes explicit control over bending and torsion stiffness, deformation through prescription of a volumetric curvature field and robust interaction of micropolar deformables with dynamic collisions.
» Show BibTeX
@article{LFJ+23,
author = {L\"{o}schner, Fabian and Fern\'{a}ndez-Fern\'{a}ndez, Jos\'{e} Antonio and Jeske, Stefan Rhys and Longva, Andreas and Bender, Jan},
title = {Micropolar Elasticity in Physically-Based Animation},
year = {2023},
issue_date = {August 2023},
publisher = {Association for Computing Machinery},
address = {New York, NY, USA},
volume = {6},
number = {3},
url = {https://doi.org/10.1145/3606922},
doi = {10.1145/3606922},
journal = {Proceedings of the ACM on Computer Graphics and Interactive Techniques},
month = {aug},
articleno = {46},
numpages = {24}
}
Fast Octree Neighborhood Search for SPH Simulations
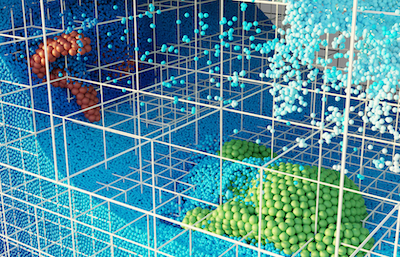
We present a new octree-based neighborhood search method for SPH simulation. A speedup of up to 1.9x is observed in comparison to state-of-the-art methods which rely on uniform grids. While our method focuses on maximizing performance in fixed-radius SPH simulations, we show that it can also be used in scenarios where the particle support radius is not constant thanks to the adaptive nature of the octree acceleration structure.
Neighborhood search methods typically consist of an acceleration structure that prunes the space of possible particle neighbor pairs, followed by direct distance comparisons between the remaining particle pairs. Previous works have focused on minimizing the number of comparisons. However, in an effort to minimize the actual computation time, we find that distance comparisons exhibit very high throughput on modern CPUs. By permitting more comparisons than strictly necessary, the time spent on preparing and searching the acceleration structure can be reduced, yielding a net positive speedup. The choice of an octree acceleration structure, instead of the uniform grid typically used in fixed-radius methods, ensures balanced computational tasks. This benefits both parallelism and provides consistently high computational intensity for the distance comparisons. We present a detailed account of high-level considerations that, together with low-level decisions, enable high throughput for performance-critical parts of the algorithm.
Finally, we demonstrate the high performance of our algorithm on a number of large-scale fixed-radius SPH benchmarks and show in experiments with a support radius ratio up to 3 that our method is also effective in multi-resolution SPH simulations.
» Show BibTeX
@ARTICLE{ FWL+22,
author= {Jos{\'{e}} Antonio Fern{\'{a}}ndez-Fern{\'{a}}ndez and Lukas Westhofen and Fabian L{\"{o}}schner and Stefan Rhys Jeske and Andreas Longva and Jan Bender },
title= {{Fast Octree Neighborhood Search for SPH Simulations}},
year= {2022},
journal= {ACM Transactions on Graphics (SIGGRAPH Asia)},
publisher= {ACM},
volume = {41},
number = {6},
pages= {13}
}
Fast Corotated Elastic SPH Solids with Implicit Zero-Energy Mode Control
We develop a new operator splitting formulation for the simulation of corotated linearly elastic solids with Smoothed Particle Hydrodynamics (SPH). Based on the technique of Kugelstadt et al. [KKB2018] originally developed for the Finite Element Method (FEM), we split the elastic energy into two separate terms corresponding to stretching and volume conservation, and based on this principle, we design a splitting scheme compatible with SPH. The operator splitting scheme enables us to treat the two terms separately, and because the stretching forces lead to a stiffness matrix that is constant in time, we are able to prefactor the system matrix for the implicit integration step. Solid-solid contact and fluid-solid interaction is achieved through a unified pressure solve. We demonstrate more than an order of magnitude improvement in computation time compared to a state-of-the-art SPH simulator for elastic solids.
We further improve the stability and reliability of the simulation through several additional contributions. We introduce a new implicit penalty mechanism that suppresses zero-energy modes inherent in the SPH formulation for elastic solids, and present a new, physics-inspired sampling algorithm for generating high-quality particle distributions for the rest shape of an elastic solid. We finally also devise an efficient method for interpolating vertex positions of a high-resolution surface mesh based on the SPH particle positions for use in high-fidelity visualization.
» Show BibTeX
@article{KBF+21,
author = {Kugelstadt, Tassilo and Bender, Jan and Fern{\'{a}}ndez-Fern{\'{a}}ndez, Jos{\'{e}} Antonio and Jeske, Stefan Rhys and L{\"{o}}schner, Fabian and Longva, Andreas},
title = {Fast Corotated Elastic SPH Solids with Implicit Zero-Energy Mode Control},
year = {2021},
issue_date = {September 2021},
publisher = {Association for Computing Machinery},
address = {New York, NY, USA},
volume = {4},
number = {3},
url = {https://doi.org/10.1145/3480142},
doi = {10.1145/3480142},
journal = {Proc. ACM Comput. Graph. Interact. Tech.},
month = sep,
articleno = {33},
numpages = {21},
keywords = {Smoothed Particle Hydrodynamics, fluid simulation, deformable solids, solid-fluid coupling}
}
Higher-Order Finite Elements for Embedded Simulation
As demands for high-fidelity physics-based animations increase, the need for accurate methods for simulating deformable solids grows. While higher-order finite elements are commonplace in engineering due to their superior approximation properties for many problems, they have gained little traction in the computer graphics community. This may partially be explained by the need for finite element meshes to approximate the highly complex geometry of models used in graphics applications. Due to the additional per-element computational expense of higher-order elements, larger elements are needed, and the error incurred due to the geometry mismatch eradicates the benefits of higher-order discretizations. One solution to this problem is the embedding of the geometry into a coarser finite element mesh. However, to date there is no adequate, practical computational framework that permits the accurate embedding into higher-order elements.
We develop a novel, robust quadrature generation method that generates theoretically guaranteed high-quality sub-cell integration rules of arbitrary polynomial accuracy. The number of quadrature points generated is bounded only by the desired degree of the polynomial, independent of the embedded geometry. Additionally, we build on recent work in the Finite Cell Method (FCM) community so as to tackle the severe ill-conditioning caused by partially filled elements by adapting an Additive-Schwarz-based preconditioner so that it is suitable for use with state-of-the-art non-linear material models from the graphics literature. Together these two contributions constitute a general-purpose framework for embedded simulation with higher-order finite elements.
We finally demonstrate the benefits of our framework in several scenarios, in which second-order hexahedra and tetrahedra clearly outperform their first-order counterparts.
» Show BibTeX
@ARTICLE{ LLKFB20,
author= {Andreas Longva and Fabian L{\"{o}}schner and Tassilo Kugelstadt and Jos{\'{e}} Antonio Fern{\'{a}}ndez-Fern{\'{a}}ndez and Jan Bender },
title= {{Higher-Order Finite Elements for Embedded Simulation}},
year= {2020},
journal= {ACM Transactions on Graphics (SIGGRAPH Asia)},
publisher= {ACM},
volume = {39},
number = {6},
pages= {14}
}
